能够许多初学者听到机械人操纵体系,就被“操纵体系”几个字吓住了。实在简朴点说,ROS就是一个散布式的通讯框架,协助法式历程之间更便利地通讯。
一个机械人凡是包罗多个部件,每一个部件都有配套的掌握法式,以完成机械人的活动与视听功用等。那末要和谐一个机械人中的这些部件,大概和谐由多个机械人构成的机械人集群,怎样办呢?这时候就需求让分离的部件可以相互通讯,在多机械人集群中,这些分离的部件还分离在差别的机械人上。处理这类散布式通讯成绩恰是ROS的设想初志。
跟着愈来愈多的人到场ROS开辟及源码奉献,社区出现出大批的第三方东西和适用开源软件包,使ROS酿成如今的模样。
一个常常让初学者猜疑的处所是,学会了ROS就是学会机械人开辟了吗?固然不是,严厉意义上讲ROS只是一套通讯框架罢了,机械人中的各类算法和使用法式仍然是用C++、Python等常见编程言语停止开辟的。
在正式进修ROS之前,先引见ROS的几个特征,即元操纵体系、散布式通讯机制、松耦合软件框架、丰硕的开源功用库等,来帮各人成立一些理性的熟悉。
ROS是一个机械人范畴的元操纵体系。也就是说,它并非真正意义上的操纵体系,其底层的使命调理、编译、装备驱动等仍是由它的原生操纵体系Ubuntu Linux完成。
ROS实践上是运转在Ubuntu Linux上的亚操纵体系,大概说软件框架,但供给硬件笼统、函数挪用、历程办理这些相似操纵体系的功用,也供给用于获得、编译、跨平台的函数和东西。
ROS的中心机想就是将机械人的软件功用做成一个个节点,节点之间经由过程相互发送动静停止相同。这些节点能够布置在统一台主机上,也能够布置在差别主机上,以至还能够布置在互联网上。ROS收集通讯机制中的主节点(master)卖力对收集中各个节点之间的通讯历程停止办理调理,同时供给一个用于设置收集中全局参数的效劳。
ROS是松耦合软件框架,操纵散布式通讯机制完成节点间的历程通讯。ROS的软件代码以松耦合方法构造,开辟历程灵敏,办理保护便利。
ROS具有丰硕的开源功用库。ROS是基于BSD(Berkeley Software Distribution,伯克利软件刊行)和谈的开源软件,许可任何人修正、重用、重公布和在贸易和闭源产物中利用,利用ROS可以快速地搭建本人的机械人原型。
与Linux刊行版相似,ROS刊行版内置了一系列常勤奋能包,行将ROS体系打包装置到原生体系中。ROS最后是基于Ubuntu体系开辟的,ROS的刊行版本称号也和Ubuntu接纳了一样的划定规矩,即版本称号由两个不异首字母的英文单词构成,版本首字母按字母表递增次第拔取,图1-1展现了ROS的一些次要版本。

要想学好和用好ROS,需求停止大批的理论操纵。因而在快速理解ROS的中心观点和编程范式后,就要分离大批的实践项目来深化了解ROS。学会用准确的方法处理成绩,能帮你更快地进步才能。ROS的进修资本次要有以下几个。
装置完ROS后,许多伴侣该当火烧眉毛想立马开端写法式。因为ROS的架构比力庞大,为了前面简单了解碰到的各类观点,这里先会商一下ROS的体系架构,好让各人对ROS中的各类观点有片面性把控。根据官方的说法,能够别离从计较图、文件体系和开源社区视角来了解ROS架构。
ROS中可施行法式的根本单元叫节点(node),节点之间经由过程动静机制停止通讯,如许就构成了一张网状图,也叫计较图,如图1-3所示。
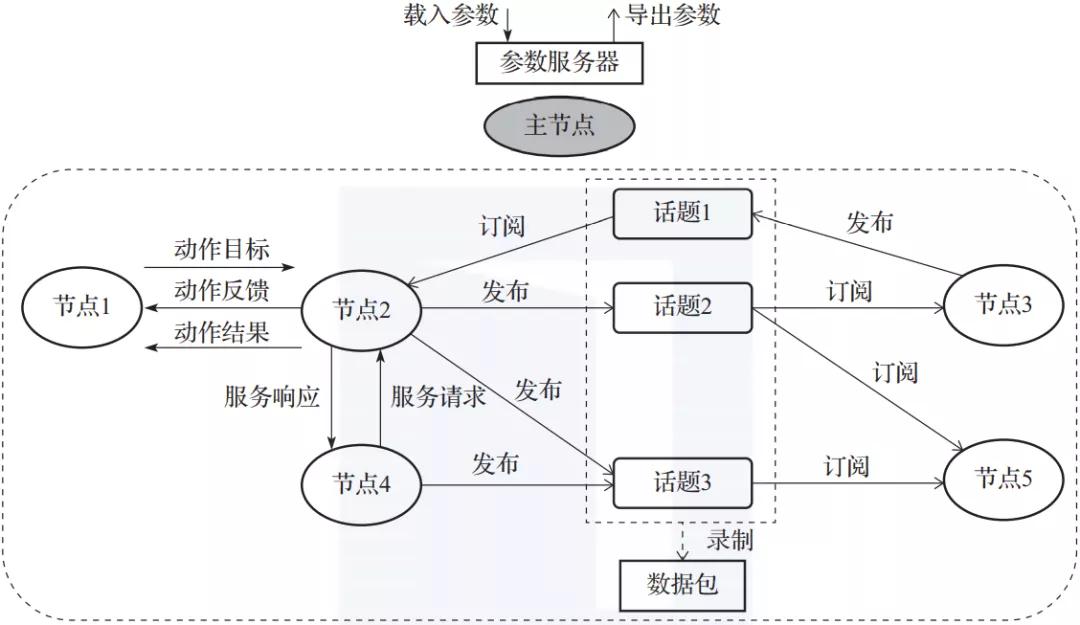
节点是可施行法式,凡是也叫历程。ROS功用包中创立的每一个可施行法式在被启动加载到体系历程中后,就是一个ROS节点,如图1-3中的节点1、节点2、节点3等。
节点之间经由过程收策动静停止通讯,动静收发机制分为话题(topic)、效劳(service)和行动(action)三种,如图1-3中的节点2与节点3、节点2与节点5接纳线接纳行动通讯。计较图中的节点、话题、效劳、行动都要有独一位称作为标识。
ROS操纵节点将代码和功用解耦,进步了体系的容错性和可保护性。以是最好让每一个节点都具有特定的单一功用,而不是创立一个一应俱全的宏大节点。假如用C++编写节点,需求用到ROS供给的roscpp库;假如用Python编写节点,需求用到ROS供给的rospy库。
动静是组成计较图的枢纽,包罗动静机制和动静范例两部门。动静机制有话题、效劳和行动三种,每种动静机制中通报的数据都具有特定的数据范例(即动静范例),动静范例可分为话题动静范例、效劳动静范例和行动动静范例。动静机制和动静范例将在1.5节中睁开解说。
数据包(rosbag)是ROS中特地用来保留和回放话题中数据的文件,能够将一些难以搜集的传感器数据用数据包录制下来,然后重复回放来停止算法机能调试。
参数效劳器可以为全部ROS收集中的节点供给便于修正的参数。参数能够以为是节点中可供内部修正的全局变量,有静态参数和静态参数。静态参数普通用于在节点启动时设置节点事情形式;静态参数能够用于在节点运转时静态设置节点或改动节点事情形态,好比机电掌握节点里的PID掌握参数。
主节点卖力各个节点之间通讯历程的调理办理。因而主节点必须要开始启动,能够经由过程roscore号令启动。
ROS法式的差别组件要放在差别的文件夹中,这些文件夹按照差别的功用对文件停止构造,这就是ROS的文件体系构造,如图1-4所示。
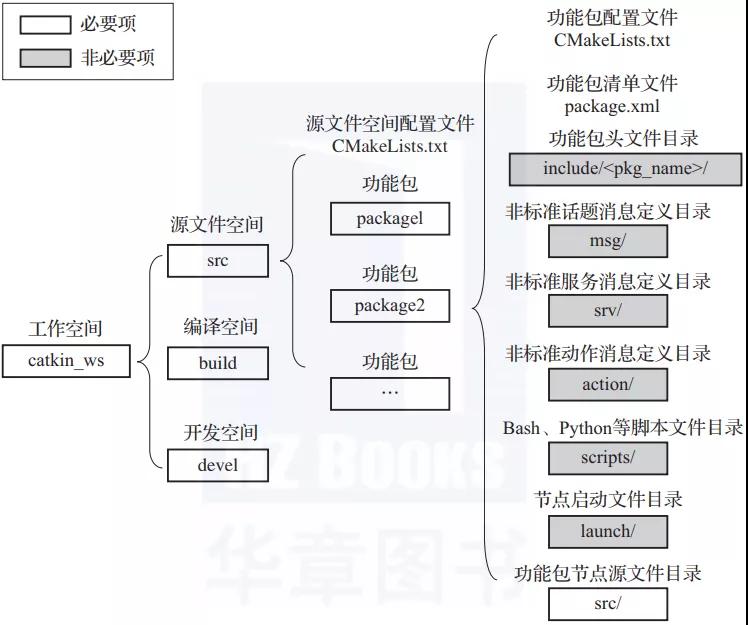
事情空间是一个包罗功用包、编译包和编译后可施行文件的文件夹,用户能够按照本人的需求创立多个事情空间,在每一个事情空间中开辟差别用处的功用包。在图1-4中,我们创立了一个名为catkin_ws的事情空间,此中包罗src、build和devel三个文件夹。
src文件夹安排各个功用包和设置功用包的CMake设置文件CMakeLists.txt。这里阐明一下,因为ROS中的源码接纳catkin东西停止编译,而catkin东西又基于CMake手艺,以是我们在src源文件空间和各个功用包中城市晤到一个CMake设置文件CMakeLists.txt,这个文件起到设置编译的感化。 build文件夹安排编译CMake和catkin功用包时发生的缓存、设置、中心文件等。 devel文件夹安排编译好的可施行法式,这些可施行法式是不需求装置就可以间接运转的。一旦功用包源码编译和测试经由过程后,能够将这些编译好的可施行文件间接导出与其他开辟职员分享。
功用包是ROS中软件构造的根本情势,具有创立ROS法式的最小构造和起码内容,它包罗ROS节点源码、剧本、设置文件等。
CMakeLists.txt是功用包设置文件,用于编译Cmake功用包编译时的编译设置。 package.xml是功用包清单文件,用xml的标签格局标识表记标帜该功用包的各种相干信息,好比包的称号、开辟者信息、依靠干系等,次要是为了使功用包的装置和分发更简单。 include/ 是功用包头文件目次,能够把功用包法式中包罗的*.h头文件放在这里。include目次之以是还要加一级途径 是为了更好地辨别本人界说的头文件和体系尺度头文件, 用实践功用包的称号替换。不外这个文件夹不是须要项,比若有些法式没有头文件。 msg、srv和action这三个文件夹别离用于寄存非尺度话题动静、效劳动静和行动动静的界说文件。ROS撑持用户自界说动静通讯过程当中利用的动静范例。这些自界说动静不是须要的,好比法式只利用尺度动静范例。 scripts目次寄存Bash、Python等剧本文件,为非须要项。 launch目次寄存节点的启动文件,nch文件用于启动一个或多个节点,在含有多个节点的大型项目中很有效,为非须要项。 src目次寄存功用包节点所对应的源代码,一个功用包中能够有多个节点法式来完成差别的功用,每一个节点法式都能够零丁运转。这里src目次寄存的是这些节点法式的源代码,你能够按需创立文件夹和文件来构造源代码,源代码能够用C++、Python等编写。 3. 从开源社区视角了解ROS架构
ROS是开源软件,各个自力的收集社辨别享和奉献软件及教程,构成了壮大的ROS开源社区,如图1-5所示。
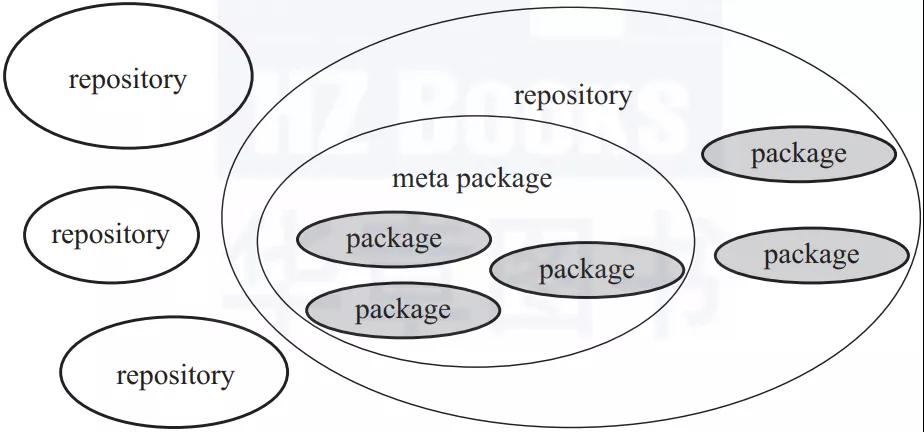
ROS的开展依靠于开源和同享的软件,这些代码由差别的机构同享和公布,好比GitHub源码同享、Ubuntu软件堆栈公布、第三方库等。ROS的官方wiki是主要的文档会商社区,在内里能够很便利地公布与修正响应的文档页面。ROS的answer主页里有大批ROS开辟者的发问和答复,对ROS开辟中碰到的各类成绩的会商很活泼。
关于作者:张虎,深圳市睿思智行科技有限公司CEO。曾就任于深圳市智能机械人研讨院,掌管机械人自立导航方面的研讨项目。事情时期以网名“小虎哥哥爱进修”在知乎、CSDN爱游戏全站官网、bilibili等平台创作了大批机械人SLAM导航相干的优良博客文章及视频教程,深受广阔网友的喜欢。他对强野生智能的研讨十分感爱好,并努力于将具有先辈智能的机械人停止财产化落地。
逐日头条、业界资讯、热门资讯、八卦爆料,全天跟踪微博播报。各类爆料、黑幕、花边、资讯一扫而光。百万互联网粉丝互动到场,TechWeb官方微博等待您的存眷。




 官方微信
官方微信

 官方微博
官方微博

